
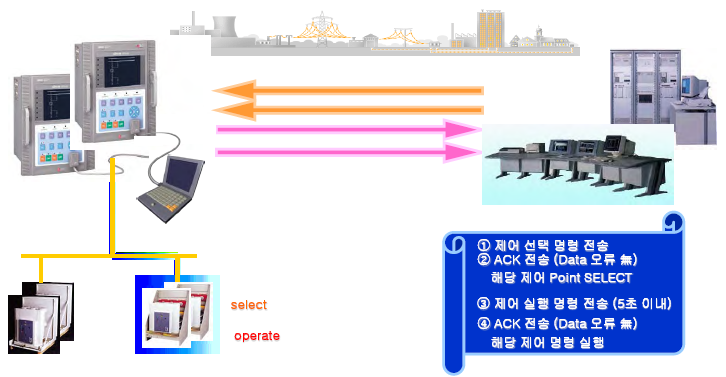
SBO (Select Before Operating) 기능
• CB on/off 제어 명령의 수행 전, 해당 제어 Point를 먼저 선택 후 정상 응답 시에만 명령 수행
• 제어 Point는 Select 된 후, 5초 이내에 실행 명령 수신 시 동작
• 제어 Point는 Select 된 후, 5초 이내에 실행 명령 수신 시 동작
SBO 수행 과정
1. 예를 들어 CB on 명령에 대한 command 프레임이 1000 이고, Reset 명령( 이 밖의 모든 명령이 될 수 있음)이 1001 이라 가정할 때,
감시반에서 CB on 명령을 내리면 통신 선로 상에는 1000 이라는 Data 프레임이 전송되는데 통신 선로상의 noise등의 원인으로 인해1000-1001로 바뀌게 되면 (주1) 감시반에서 송신한 명령(CB on command)이 GIPAM 2000에서 수신한 명령(Reset)과 전혀 달라지게 된다.
이와 같은 통신 선로상의 오류를 방지하기 위해 GIPAM 2000 에서는 감시반으로부터 CB on 명령을 받으면 곧바로 제어를
수행하지 않는다.
대신에 CB on 명령에 해당하는 point만을 우선 select하고 다음 명령(operation)을 기다리게 된다.
감시반 에서는 이에 대해 다시 operation 명령을 내려 보내게 되고 GIPAM 2000은 이제서야 비로소
제어 명령을 수행하게 된다. 이와 같은 이유 때문에 Select Before Operation (실제 제어 명령의 수행 이전에 제어 point를 먼저
선택 한다는 의미)라는 이름이 붙여 졌다고 할 수 있다.
위의 과정에서 잘 알려진 CRC체크 (주2) 와 같은 에러제어는 별도의 과정으로 수행된다.
따라서 Data 통신상의 일반적인 에러 제어 과정 외에 별도의 에러 감시 기능을 두어 통신 선로상의
noise 등의 원인으로 발생 될 수 있는 오동작을 방지 할 수 있다.
주(1) 통신 선로상에서 위와 같이 Data 프레임이 0에서 1로 또는 1에서 0으로 바뀌는 이유는 (주로 Data가 깨진다고 표현함) 1과 0이라는 신호가 전압에 의해 구분되기 때문이다. 따라서 noise등의 침입은 논리 0 신호를 1로 바꿀 수 있고, 선로 저항으로 인한 전압
강하는 논리 1 신호를 0으로 바꿀 수 있다. (I-net 통신망에서 Repeater를 설치 하거나, 핸드폰 사업자들이 여러곳에 기지국을 갖고 있는 이유 또한 이 때문이다.)
Digital 통신 에서는 0과 1의 두가지 신호만이 존재하고 모든 명령은 1과 0신호의 조합
(Data 프레임이라 함)으로 구성되어 송 수신 되는데 이러한 1과 0이라는 신호는 전압에 의해 구분된다.
예를 들어 RS-232에서는 15m 이내의 거리에서 9600bps의 속도를 표준으로 하며 논리 1 은 +3V이상, 논리 0은 -3V이상의 신호를 규정하고 있다.(+와 –를 사용하므로 양극이란 의미 에서 Bipolar 신호라 칭함) 또한 TTL (Transister로 구성된 전자
회로의 일종) 에서는 +2.4V 이상의 신호를 논리 1로, 그 이하의 신호를 논리 0으로 규정하고 있다.
(+신호만을 사용함으로 단극이란 의미에서 unipolar 신호라 칭함) 실제로는 ±12V가 가장 널리 쓰인다.
1. 예를 들어 CB on 명령에 대한 command 프레임이 1000 이고, Reset 명령( 이 밖의 모든 명령이 될 수 있음)이 1001 이라 가정할 때,
감시반에서 CB on 명령을 내리면 통신 선로 상에는 1000 이라는 Data 프레임이 전송되는데 통신 선로상의 noise등의 원인으로 인해1000-1001로 바뀌게 되면 (주1) 감시반에서 송신한 명령(CB on command)이 GIPAM 2000에서 수신한 명령(Reset)과 전혀 달라지게 된다.
이와 같은 통신 선로상의 오류를 방지하기 위해 GIPAM 2000 에서는 감시반으로부터 CB on 명령을 받으면 곧바로 제어를
수행하지 않는다.
대신에 CB on 명령에 해당하는 point만을 우선 select하고 다음 명령(operation)을 기다리게 된다.
감시반 에서는 이에 대해 다시 operation 명령을 내려 보내게 되고 GIPAM 2000은 이제서야 비로소
제어 명령을 수행하게 된다. 이와 같은 이유 때문에 Select Before Operation (실제 제어 명령의 수행 이전에 제어 point를 먼저
선택 한다는 의미)라는 이름이 붙여 졌다고 할 수 있다.
위의 과정에서 잘 알려진 CRC체크 (주2) 와 같은 에러제어는 별도의 과정으로 수행된다.
따라서 Data 통신상의 일반적인 에러 제어 과정 외에 별도의 에러 감시 기능을 두어 통신 선로상의
noise 등의 원인으로 발생 될 수 있는 오동작을 방지 할 수 있다.
주(1) 통신 선로상에서 위와 같이 Data 프레임이 0에서 1로 또는 1에서 0으로 바뀌는 이유는 (주로 Data가 깨진다고 표현함) 1과 0이라는 신호가 전압에 의해 구분되기 때문이다. 따라서 noise등의 침입은 논리 0 신호를 1로 바꿀 수 있고, 선로 저항으로 인한 전압
강하는 논리 1 신호를 0으로 바꿀 수 있다. (I-net 통신망에서 Repeater를 설치 하거나, 핸드폰 사업자들이 여러곳에 기지국을 갖고 있는 이유 또한 이 때문이다.)
Digital 통신 에서는 0과 1의 두가지 신호만이 존재하고 모든 명령은 1과 0신호의 조합
(Data 프레임이라 함)으로 구성되어 송 수신 되는데 이러한 1과 0이라는 신호는 전압에 의해 구분된다.
예를 들어 RS-232에서는 15m 이내의 거리에서 9600bps의 속도를 표준으로 하며 논리 1 은 +3V이상, 논리 0은 -3V이상의 신호를 규정하고 있다.(+와 –를 사용하므로 양극이란 의미 에서 Bipolar 신호라 칭함) 또한 TTL (Transister로 구성된 전자
회로의 일종) 에서는 +2.4V 이상의 신호를 논리 1로, 그 이하의 신호를 논리 0으로 규정하고 있다.
(+신호만을 사용함으로 단극이란 의미에서 unipolar 신호라 칭함) 실제로는 ±12V가 가장 널리 쓰인다.
